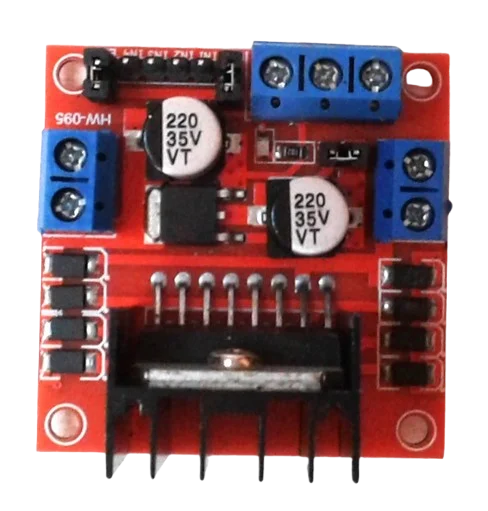
Description
Ce composant reçoit des signaux de commande logique basse puissance (5V TTL) et peut fournir une alimentation forte puissance aux moteurs.
Caractéristiques techniques principales
-
Tension d’alimentation des moteurs (Vs) : de +6 V à +35 V (selon charge)
-
Tension d’alimentation logique (Vss) : 5 V (alim logique)
-
Courant maximal par canal : jusqu’à 2 A en pointe, 1-2 A en continu
-
Puissance maximale dissipée : environ 25 W (nécessite souvent un dissipateur)
-
Nombre de moteurs contrôlés : 2 moteurs DC ou 1 moteur pas à pas bipolaire 4 fils
-
Entrées de contrôle : 4 entrées digitales (IN1, IN2, IN3, IN4) pour contrôler le sens et la marche de chaque moteur
-
Entrées Enable (ENA, ENB) : pour activer/désactiver chaque pont en H, possible de contrôler la vitesse via PWM
-
Fonction de pont en H : permet d’inverser le sens de rotation des moteurs en faisant varier les signaux des entrées
-
Protection : diodes internes de roue libre pour les transitoires, protection contre les surtensions
-
Interface : compatible avec les microcontrôleurs Arduino, ESP32, Raspberry Pi, STM32, etc.
-
Format : disponible en circuit intégré (DIP) et en modules avec dissipateur thermique et borniers
Fonctionnement
-
Le L298 reçoit des commandes logiques pour faire tourner les moteurs dans un sens ou l’autre, ou l’arrêter.
-
Il offre aussi la possibilité de modulation de largeur d’impulsion (PWM) sur les broches Enable pour ajuster la vitesse des moteurs.
-
Parfait pour le pilotage précis des moteurs pas à pas bipolaires dans des applications robot ou CNC.